![]()

Build a state machine in Julia based on functions along with stepping and visualization tools
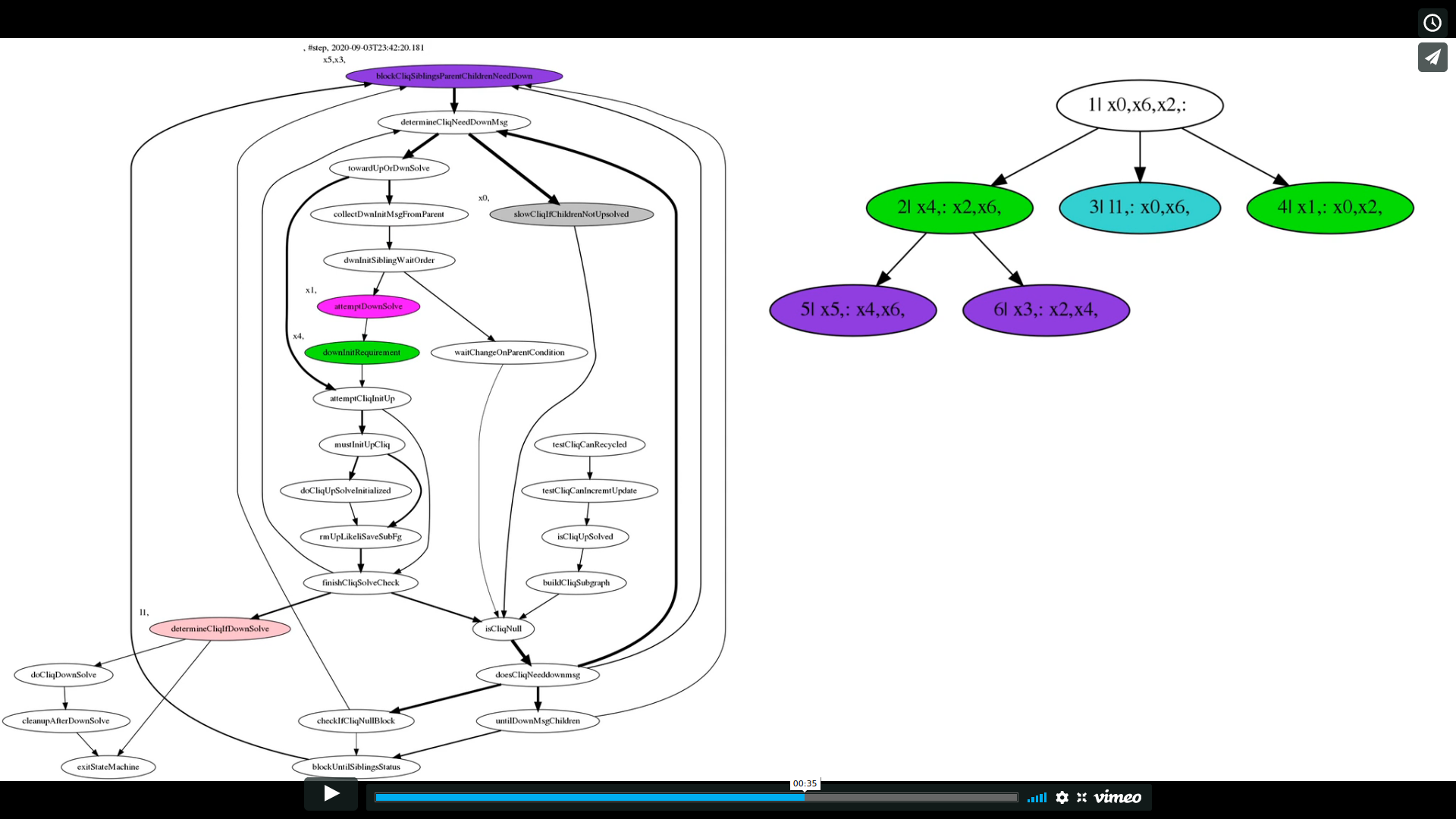
Click the Vimeo image as link to a FSM generated video animation of six concurrent state machines (as used in IncrementalInference.jl).
Visualization tools require a system install of graphviz. Do Ubuntu/Debian Linux equivalent of:
sudo apt-get install graphvizJulia ≥ 0.7 add package
julia> ]
(v1.5) pkg> add FunctionalStateMachineusing FunctionalStateMachine
## User state functions
function bar!(usrdata)
println("do bar!")
return FunctionalStateMachine.exitStateMachine
end
function foo!(usrdata)
println("do foo!")
return bar!
end
# no user data struct defined, so just pass Nothing
statemachine = StateMachine{Nothing}(next=foo!)
while statemachine(nothing, verbose=true); end
# or maybe limit number of steps
statemachine = StateMachine{Nothing}(next=foo!)
while statemachine(nothing, iterlimit=1); endSometimes it is useful to know that an FSM process will exit, either as intended or by throwing an error on timeout (much like a Watchdog Timer). FSM uses Base.InterruptException() as a method of stopping a task that expires a timeout::Real [seconds]. Note, this functionality is not included by default in order to preserve a small memory footprint. To use the timeout feature simply call the state machine with a timeout duration:
userdata = nothing # any user data of type T
timeout = 3.0
while statemachine(userdata, timeout, verbose=true); endExperience has shown that when a state machine gets stuck, it is often useful to write the verbose steps out to file as a bare minimum guide of where a system might be failing. This can be done by passing in a ::IOStream handle into verbosefid:
fid = open("/tmp/verboseFSM_001.log","w")
while statemachine(userdata, verbose=true, verbosefid=fid); end
close(fid)This particular structure is chosen so that @async or other multithreaded uses of FSM can still write to a common fid and also allow the user to flush(fid) and close(fid) regardless of whether the FSM has stalled. Might seem "boilerplate-esque", but it's much easier for developers to snuff out bugs in highly complicted interdependent and multithreaded, multi-state-machine architectures.
## Passing a data structure
mutable struct ExampleUserData
x::Vector{Float64}
end
# or maybe record the state machine history
statemachine = StateMachine{ExampleUserData}(next=foo!)
eud = ExampleUserData(randn(10))
while statemachine(eud, recordhistory=true); end
# recover recorded state transition history, `::Vector{Tuple{DateTime,Int,Function,T}}`
hist = statemachine.history
# or maybe rerun a step on the data as it was at that time -- does not overwrite previous memory
new_eud_at_1 = sandboxStateMachineStep(hist, 1)# ]add Graphs # in case the dependency is not installed yet
using Graphs
# run the state machine
statemachine = StateMachine{ExampleUserData}(next=foo!)
eud = ExampleUserData(randn(10))
while statemachine(eud, recordhistory=true); end
# draw the state machine
hist = statemachine.history
drawStateMachineHistory(hist, show=true)using Graphs, FunctionalStateMachine
#...
# start multiple concurrent FSMs (this is only one)
## they are likely interdependent
statemachine = StateMachine{Nothing}(next=foo!)
while statemachine(nothing, recordhistory=true); end
# add all histories to the `hists::Dict` as follows
## ths example has userdata of type ::Nothing
hists = Dict{Symbol,Vector{Tuple{DateTime,Int,Function,Nothing}}}(:first => statemachine.history)
# generate all the images that will make up the video
animateStateMachineHistoryIntervalCompound(hists, interval=1)
# and convert images to video with ffmpeg as shell command
fps = 5
run(`ffmpeg -r 10 -i /tmp/caesar/csmCompound/csm_%d.png -c:v libtheora -vf fps=$fps -pix_fmt yuv420p -vf "scale=trunc(iw/2)*2:trunc(ih/2)*2" -q 10 /tmp/caesar/csmCompound/out.ogv`)
@async run(`totem /tmp/caesar/csmCompound/out.ogv`)can combine multiple concurrent histories of the state machine execution into the same image frames. See function for more details.
The following example function shows several state machines that were run asyncronously can be synchronously animated as separate frames (see below for single frame with multiple information):
using Dates, DocStringExtensions
"""
$SIGNATURES
Draw many images in '/tmp/?/csm_%d.png' representing time synchronized state machine
events.
Notes
- State history must have previously been recorded.
"""
function animateStateMachines(histories::Vector{<:Tuple}; frames::Int=100)
startT = Dates.now()
stopT = Dates.now()
# get start and stop times across all cliques
first = true
# hist = somestatemachine.history
for hist in histories
if hist[1][1] < startT
startT = hist[1][1]
end
if first
stopT = hist[end][1]
end
if stopT < hist[end][1]
stopT= hist[end][1]
end
end
# export all figures
folders = String[]
count = 0
for hist in histories
count += 1
retval = animateStateMachineHistoryByTime(hist, frames=frames, folder="sm$count", title="SM-$count", startT=startT, stopT=stopT)
push!(folders, "sm$count")
end
return folders
end
# animate the time via many png images in `/tmp`
animateCliqStateMachines([hist1; hist2], frames=100)This example will result in 100 images for both hist1, hist state machine history. Note the timestamps are used to synchronize animations images on concurrent state traversals, and can easily be made into a video with OpenShot or ffmpeg style tools.
A closely related function
animateStateMachineHistoryByTimeContributions and Issues welcome.