В этом репозитории находится модель для семантической сегментации изображений с дрона с целью помощи наземному роботу.
UAVid --- датасет для семантической сегментации, снятый с беспилотного летательного аппарата.
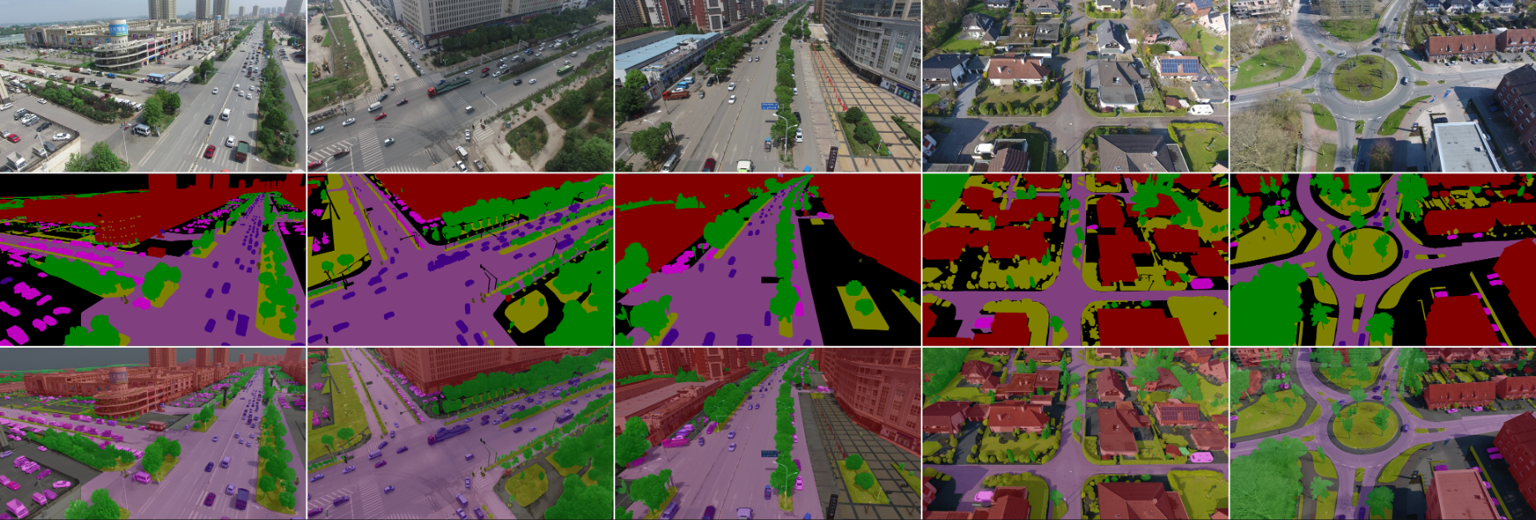
В нём 8 классов:
- Building
- Road
- Static car
- Tree
- Low vegetation
- Human
- Moving car
- Background clutter
Поскольку он представляет интерес и отдельно от задачи помощи роботу, обучение производилось для классов из датасета. Во время инференса есть возможность преобразовать в другой формат классов.
Модель была обучена на Nvidia A100 с использованием 77Gb GPU. Возможно обойтись меньшими ресурсами, уменьшив batch size и размер изображений --- настраивается в config.yml.
Inference практически на любом компьютере.
Работа проверена только под ОС Linux.
Необходим Python>=3.10 и библиотеки к нему, они перечислены в requirements.txt.
Рекомендуется воспользоваться virtualenv: для создания нового окружения выполните python -m venv venv, а для его активации source venv/bin/activate. После этого можно установить зависимости: pip install -r requirements.txt.
train.py--- скрипт для обучения и валидации модели.inference.py--- скрипт для инференса модели на произвольных изображенияхconfig.yml--- файл конфигурации в формате YAML. Настройка модели осуществляется с использованием этого файла.UAVidToolKit--- git submodule SDK датасетаmodels/*--- веса обученных моделей. Хранятся в Git LFS.crop_imgs.py--- скрипт для обрезания изображений датасета. В новой версии модель работает с полноразмерными изображениеями, поэтому не используется.architecture.py,auxiliary.py,datasets.py--- вспомогательные файлы, непосредственная работа с которорыми не предполагается.
После клонирования репозитория не забудте инициализировать подмодуль Git.
Сделать это можно, например, командой git clone --recurse-submodules.
Для обучение используется фреймворк PyTorch и CUDA.
Перед началом работы необходимо загрузить датасет. Это можно сделать со страницы в Kaggle, либо с сайта датасета. Датасет поставляется в виде цветных семантических карт. После загрузки сгенерируйте одноканальные семантические карты при помощи скрипта из SDK:
python prepareTrainIdFiles.py -s $UAVID_DIR/uavid_train/ -t $UAVID_DIR/uavid_train
python prepareTrainIdFiles.py -s $UAVID_DIR/uavid_val/ -t $UAVID_DIR/uavid_valПараметры обучения:
decoder: используется архитектура SegNet с декодером и энкодером. Есть возможность выбрать как декодер, так и энкодер. По умолчаниюUnet++. Также доступенUnet.resolution_k: параметр задаёт размер квадратного блока, которому должно быть кратно изображение на входе модели.encoder_name: название энкодера. По умолчаниюresnet34. Возможен любой энкодер из библиотеки Segmentation models PyTorchin_channels: количество каналов на входеclasses: количество классов для сегментации. Это значение используется только для обучения модели, поэтому его имеет смысл оставить равным 8.shape: размер изображения на входе сети при обучении в формате HxW. По умолчанию 1056x1920. Для уменьшения потребления памяти можно уменьшить, однако этоdataloader: стандартные параметры для даталоадера. Применяются только к train даталоадеру; для validation используется такое же значениеnum_workers,batch_size=1,shuffle=False.dataset: на настоящий момент толькоuavid.mean,std: поканальные средние и стандартные отклонения в датасете для нормализации. При отсутствии будут вычислены.
epochs: количество эпох обучения. Реализован early stopping с валидацией, поэтому можно выбирать большое число.optim: оптимизатор. Adam либо AdamW.lr: learning rate. Кроме того используется ReduceLrOnPlateau.loss:jaccard,dice,cross_entropy
Пример запуска скрипта обучения:
CUDA_VISIBLE_DEVICES=1 python train.py -i models/resnet_crop_crossentropy.pth -c config.yml -o large --model_name resnet34_finetune_jaccard --dataset_path ../uavid --dataset uavidЗдесь
CUDA_VISIBLE_DEVICES=1--- обучение на втором ускорителе-i--- модель для fine-tuning. Если не указать аргумент-i, будет взят предобученный энкодер и декодер без обучения.-c--- путь до конфига-o--- путь для сохранения результатов запуска, в данном случае./large.--model_name--- название модели (произвольное)--dataset_path--- путь к датасету--dataset--- тип датасета, в настоящее время только uavid
Данный скрипт дообучит модель на всем датасете uavid, используя предобученную модель models/resnet_crop_crossentropy.pth.
Также возможно совершить прогон модели на валидационном датасете. Пример такого запуска:
python train.py -c config.yml -i models/resnet_crop_crossentropy.pth --dataset_path /media/Temp/uavid/ --dataset uavid --validate_onlyПараметры остаются прежними, только добавляется флаг --validate_only, а -o и --model_name теперь не обязательны.
В models находятся предобученные модели, которые можно использовать для предсказаний.
Для этого предназначен скрипт inference.py.
Список моделей:
| Jaccard index on validation | Comment | |
|---|---|---|
resnet_crop_crossentropy.pth |
0.603 | Обучена на обрезанных изображениях с CrossEntropy |
resnet_full_crossentropy.pth |
0.633 | Обучена на полных изображениях с CrossEntropy |
resnet_full_jaccard.pth |
0.642 | Обучена на обрезанных изображениях с JaccardLoss |
Для инференса служит скрипт inference.py.
Пример запуска:
python inference.py -o $UAVID_DIR/uavid_test/seq21/Outputs -m models/resnet_crop_crossentropy.pth -c config.yml $UAVID_DIR/uavid_test/seq21/Images/000000.pngЭтот скрипт совершит запустит модель на одном изображении и сохранит результат в каталог, указанный в -o.
Аналогично можно запускать инференс для целого каталога:
python inference.py -o $UAVID_DIR/uavid_test/seq21/Outputs -m models/resnet_crop_crossentropy.pth -c config.yml $UAVID_DIR/uavid_test/seq21/ImagesВ данном случае процедура будет произведена для всех изображений в этом каталоге.
Есть возможность на лету маппить классы датасета в другие классы. Для робота можно предложить 3 класса: дорога, движущееся препятствие и неподвижное препятствие. Тогда
- Дорога
- Road
- Движущееся препятствие
- Human
- Moving car
- Неподвижное препятствие
- Building
- Static Car
- Tree
- Low vegetation
- Background clutter



